Intelligent Monitoring
This fully autonomous iCrawler is equipped with lithium polymer accumulators (24 V / – 80 Ah) and will follow pre- determined missions on the seafloor, create baseline maps with video-mosaics from the environment and geo-reference all incoming sensor data to create one GIS map. The crawler will automatically avoid obstacles on the seafloor. A typical monitoring mission for the offshore industry is presented below. A baseline study will be provided with one robot 0.5- 1 years before drilling operations, followed by detailed monitoring during the 3-6 weeks drilling process and 1 mission after the end of drilling. During exploration,1 – 3 robots can monitor the environment and can be maintained via ROVs. During these missions, which allow to cover 0.2 – 1 km2 of seafloor all data will be stored and retrieved after recovery of the instrument or during ROV maintenance. On demand an emergency ascent through the water column with subsequent contact of the operational centre allows to react on environmental incidents which demand fast response.
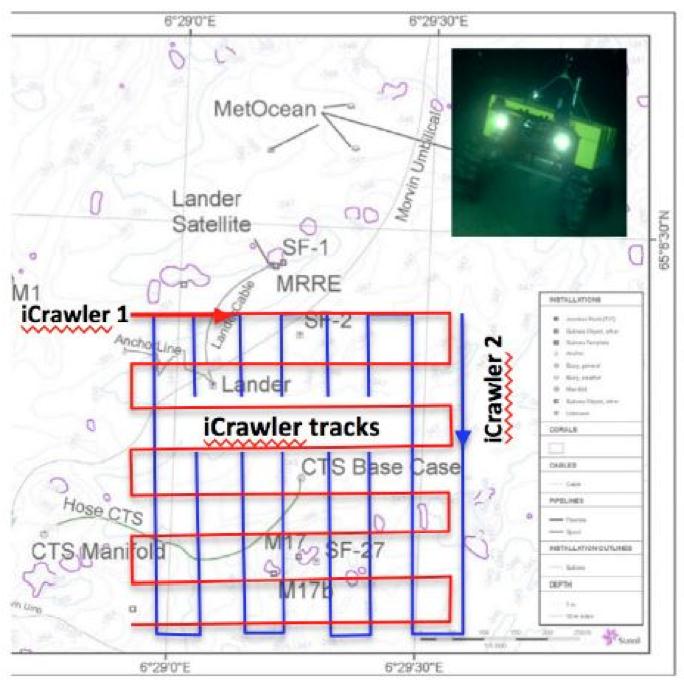
(above) Monitoring drilling operations
Rechargeable crawler
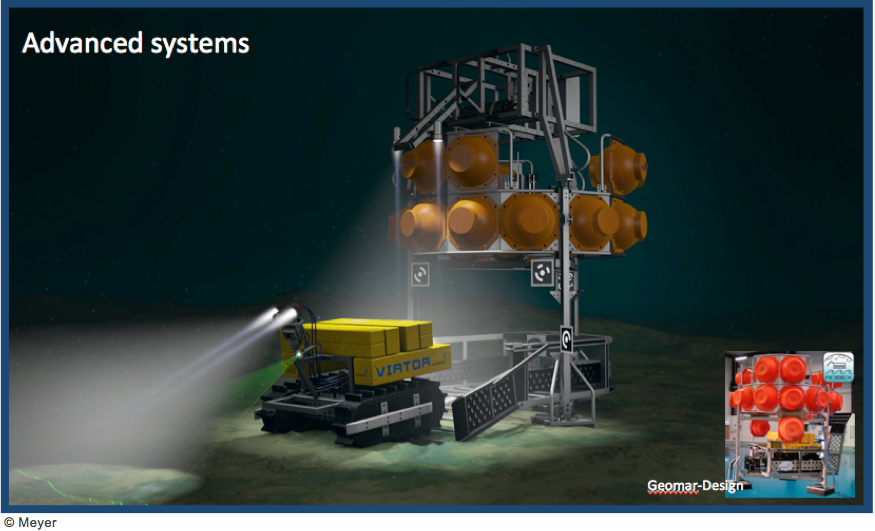
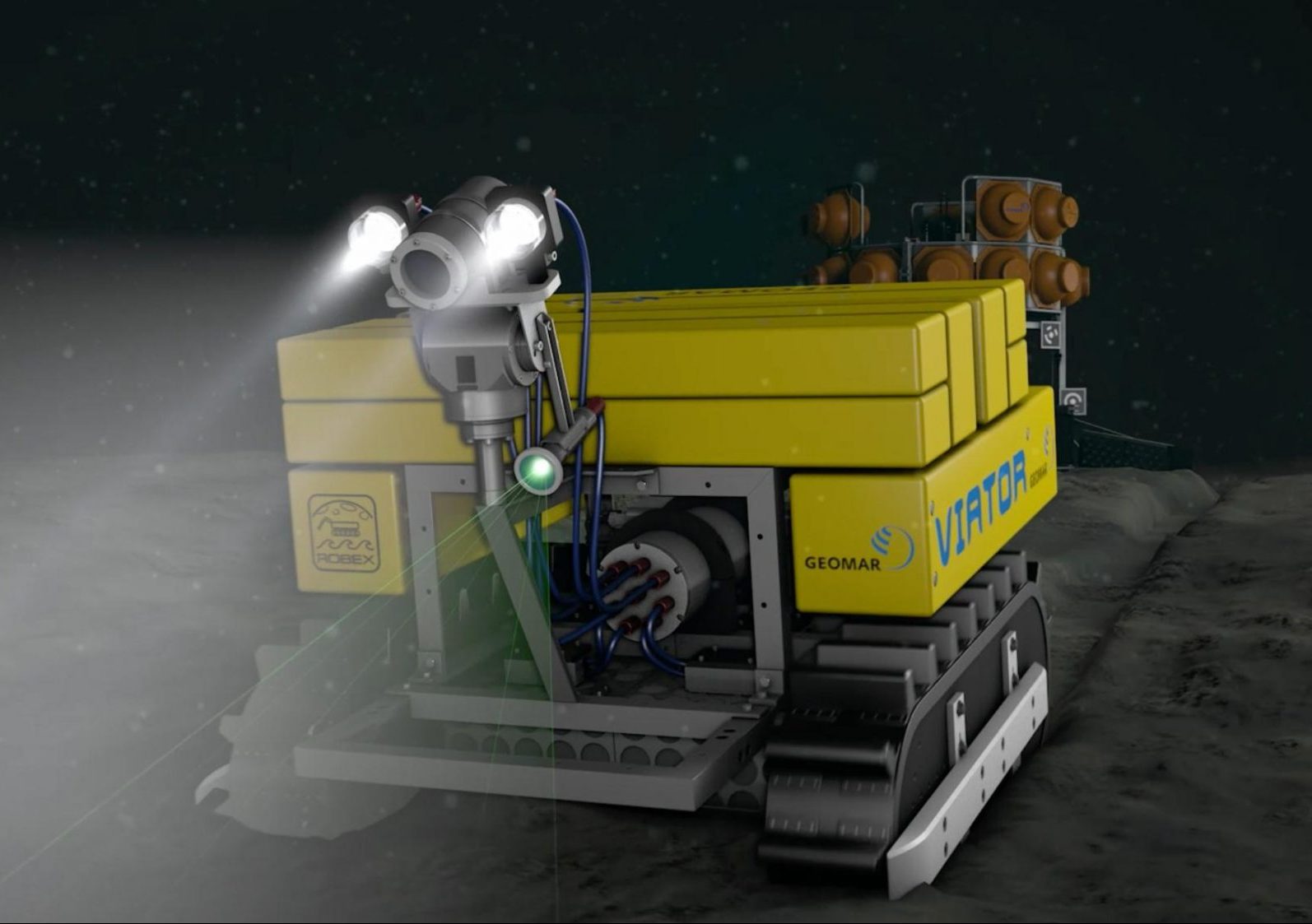
In 2017 the final development stage is reached, when an iCrawler can return to a garage/central station/junction box for data transmission and energy supply. Each final mission-plan can also be transferred to the iCrawler via Internet-connection from an operational team on land prior to deployment, thus allowing maximum flexibility for the user. A stationary lander allows video-guided deployment. This lander houses the hangar for the iCrawler and is also equipped with enough batteries to allow extended crawler- missions. The hangar is used for transport to the site of investigation and for recovery at the ocean surface as well as to recharge the accumulators on the crawler. The hangar facilitates data transfer from the lander system to the crawler and ultimately to the sea surface by acoustic modem or via a junction box. After a video-guided deployment the system operates fully autonomous for scientific missions of up to one year. The development involved careful evaluation of existing energy resources (rechargeable LiPo cells) as well as development and testing of an inductive energy transfer system (ISys; DLR). For the long-range navigation the laser-camera of GTR Bremen is used while for the docking procedure with the lander, optical, reflecting binary markers from AIRBUS D&S are used. These markers have successfully been applied in space on the ISS for docking operations.

Mining
For Deep Sea Mining operations, the crawler can follow or lead the huge cutters or collection machines and provide valuable information for the authorities. For data transfer and energy recharge the iCrawler can return to its garage which is attached to the mining machines.
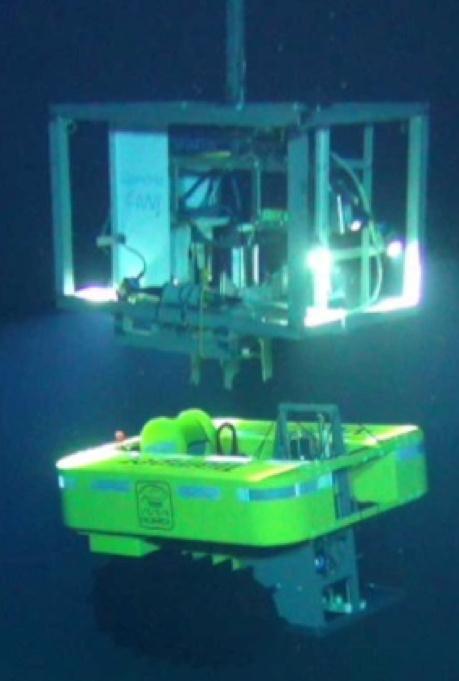 (above) Test deployment in 2015 from RV Sonne by AWI (Wenzhöfer) at 4300 m water depth at the Clarion-Clipperton fracture zone.
(above) Test deployment in 2015 from RV Sonne by AWI (Wenzhöfer) at 4300 m water depth at the Clarion-Clipperton fracture zone.
Comparison with AUVs
Crawler (typically monitoring areas of 0.1 to 1 km2 size)
Safety
- simpler technology in terms of complexity, costs, and robustness, less personal intensive
- missions can be transferred via internet onto the ship before deployment
- can safely be switched off, energy efficient, does not unintentionally interfere with infrastructure or sites of interest if unattended.
- qualifies for longterm operation both regarding robustness and energy efficiency
Stability
- solid base from which to work and sample. Sensor data can be taken accurately. Sensors can be placed more precisely than with ROVs.
- a robotic arm (on demand) allows direct access into complex habitats such as reefs (teleoperated mode)
Repeatability
- not affected by current flow conditions and can return to resample locations easier
- less personal bias in sampling. With Crawlers, different teams will operate the vehicle similarly, since the vehicle operates in 2D, sampling will be constrained (both sensor and imaging).
- at cabled observatories, experts can drive and analyze via internet
Sensor load (120 kg payload)
- crawlers are routinely equipped with 6 sensor ports, though with the stable tracked design, more can be carried if required.
- sensors and profilers can precisely penetrate the seafloor; by mounting such systems at the front of a crawler, undisturbed areas can be profiled for oxygen, pH, methane, CO2, etc. In the context of oil and gas drilling, cores to gauge drill cutting depth coverage can be easily taken, either for in situ camera observations or for transport back to a base station for retrieval and later analysis
- very detailed transect analyses with laser guided 3D habitat mapping.
- hovering capability at up to 5 m height above seafloor is under development with AIRBUS but is a challenge since the payload must be high enough to allow sensor penetration into the sediments.